












 The Marketing Minute: Marketing With Layers
The Marketing Minute: Marketing With Layers The Right Approach: Electro-Tek—A Williams Family Legacy, Part 1
The Right Approach: Electro-Tek—A Williams Family Legacy, Part 1 It’s Only Common Sense: If You’re Not Differentiated, You’re Dead
It’s Only Common Sense: If You’re Not Differentiated, You’re Dead





Self-Folding 'Rollbot' Paves the Way for Fully Untethered Soft Robots
August 23, 2019 | Harvard John A. Paulson School of Engineering and Applied SciencesEstimated reading time: 3 minutes
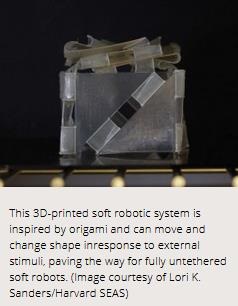
The majority of soft robots today rely on external power and control, keeping them tethered to off-board systems or rigged with hard components. Now, researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) and Caltech have developed soft robotic systems, inspired by origami, that can move and change shape in response to external stimuli, paving the way for fully untethered soft robots.
“The ability to integrate active materials within 3D-printed objects enables the design and fabrication of entirely new classes of soft robotic matter,” said Jennifer A. Lewis, the Hansjorg Wyss professor of Biologically Inspired Engineering at SEAS and co-lead author of the study.
The researchers turned to origami to create multifunctional soft robots. Through sequential folds, origami can encode multiple shapes and functionalities in a single structure. Using materials known as liquid crystal elastomers that change shape when exposed to heat, the research team 3D-printed two types of soft hinges that fold at different temperatures and thus can be programmed to fold in a specific order.
“With our method of 3D printing active hinges, we have full programmability over temperature response, the amount of torque the hinges can exert, their bending angle, and fold orientation. Our fabrication method facilitates integrating these active components with other materials,” said Arda Kotikian, a graduate student at SEAS and the Graduate School of Arts and Sciences and co-first author of the paper.
“Using hinges makes it easier to program robotic functions and control how a robot will change shape. Instead of having the entire body of a soft robot deform in ways that can be difficult to predict, you only need to program how a few small regions of your structure will respond to changes in temperature,” said Connor McMahan, a graduate student at Caltech and co-first author of the paper.
To demonstrate this method, Kotikian, McMahan, and the team built several soft devices, including an untethered soft robot nicknamed the “Rollbot.” The Rollbot begins as a flat sheet, about 8 centimeters long and 4 centimeters wide. When placed on a hot surface, about 200°C, one set of hinges folds and the robot curls into a pentagonal wheel.
Another set of hinges is embedded on each of the five sides of the wheel. A hinge folds when in contact with the hot surface, propelling the wheel to turn to the next side, where the next hinge folds. As they roll off the hot surface, the hinges unfold and are ready for the next cycle.
“Many existing soft robots require a tether to external power and control systems or are limited by the amount of force they can exert. These active hinges are useful because they allow soft robots to operate in environments where tethers are impractical and to lift objects many times heavier than the hinges,” said McMahan.
Another device, when placed in a hot environment, can fold into a compact folded shape resembling a paper clip and unfold itself when cooled.
“These untethered structures can be passively controlled,” said Kotikian. “In other words, all we need to do is expose the structures to specific temperature environments and they will respond according to how we programmed the hinges.”
While this research only focused on temperature responses, liquid crystal elastomers can also be programmed to respond to light, pH, humidity and other external stimuli.
“This works demonstrates how the combination of responsive polymers in an architected composite can lead to materials with self-actuation in response to different stimuli. In the future, such materials can be programmed to perform ever more complex tasks, blurring the boundaries between materials and robots,” said Chiara Daraio, Professor of Mechanical Engineering and Applied Physics at Caltech and co-lead author of the study.
This research was co-authored by Emily C. Davidson, Jalilah M. Muhammad, and Robert D. Weeks. It was supported by Army Research Office, and Harvard Materials Research Science and Engineering Center through the National Science Foundation, and the NASA Space Technology Research Fellowship.
Share on:




Testimonial
"In a year when every marketing dollar mattered, I chose to keep I-Connect007 in our 2025 plan. Their commitment to high-quality, insightful content aligns with Koh Young’s values and helps readers navigate a changing industry. "
Brent Fischthal - Koh YoungSuggested Items
ITW EAE Despatch Ovens Now Support ASTM 5423 Testing
10/15/2025 | ITW EAEAs the demand for high-performance electrical insulation materials continues to grow—driven by the rapid expansion of electric vehicles (EVs) and energy storage systems—thermal processing has become a critical step in material development.
Beyond Thermal Conductivity: Exploring Polymer-based TIM Strategies for High-power-density Electronics
10/13/2025 | Padmanabha Shakthivelu and Nico Bruijnis, MacDermid Alpha Electronics SolutionsAs power density and thermal loads continue to increase, effective thermal management becomes increasingly important. Rapid and efficient heat transfer from power semiconductor chip packages is essential for achieving optimal performance and ensuring long-term reliability of temperature-sensitive components. This is particularly crucial in power systems that support advanced applications such as green energy generation, electric vehicles, aerospace, and defense, along with high-speed computing for data centers and artificial intelligence (AI).
Is Glass Finally Coming of Age?
10/13/2025 | Nolan Johnson, I-Connect007Substrates, by definition, form the base of all electronic devices. Whether discussing silicon wafers for semiconductors, glass-and-epoxy materials in printed circuits, or the base of choice for interposers, all these materials function as substrates. While other substrates have come and gone, silicon and FR-4 have remained the de facto standards for the industry.
Creative Materials to Showcase Innovative Functional Inks for Medical Devices at COMPAMED 2025
10/09/2025 | Creative Materials, Inc.Creative Materials, a leading manufacturer of high-performance functional inks and coatings, is pleased to announce its participation in COMPAMED 2025, taking place November 17–20 in Düsseldorf, Germany.
Jiva Leading the Charge Toward Sustainable Innovation
09/30/2025 | Marcy LaRont, PCB007 MagazineEnvironmental sustainability in business—product circularity—is a high priority these days. “Circularity,” the term meant to replace “recycling,” in its simplest definition, describes a full circle life for electronic products and all their elements. The result is re-use or a near-complete reintroduction of the base materials back into the supply chain, leaving very little left for waste. For what cannot be reused productively, the ultimate hope is to have better, less harmful means of disposal and/or materials that can seamlessly and harmlessly decompose and integrate back into the natural environment. That is where Jiva and Soluboard come in.