










 American Made Advocacy: Five Years of Educating, Advocating, and Influencing Legislation and Policy
American Made Advocacy: Five Years of Educating, Advocating, and Influencing Legislation and Policy Defense Speak Interpreted: Understanding What the Department of Defense Is, and Isn’t
Defense Speak Interpreted: Understanding What the Department of Defense Is, and Isn’t The Right Approach: The End of an Era—DoD Proposes MIL-PRF-31032 Cancellation
The Right Approach: The End of an Era—DoD Proposes MIL-PRF-31032 Cancellation





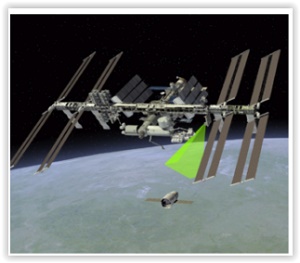
Launching soon, aboard the 10th SpaceX commercial resupply mission, will be a technology module called Raven, which will bring NASA one step closer to having a relative navigation capability. When affixed outside the International Space Station, Raven will test foundational technologies that will enable autonomous rendezvous in space, meaning they will not necessitate any human involvement — even from the ground.
A technology module known as Raven will launch aboard SpaceX 10 to the International Space Station, bringing NASA one step closer to an autopilot capability. Raven will test foundational technologies that will enable autonomous rendezvous in space, meaning they will not necessitate any human involvement. This technology, when matured, will provide autonomous rendezvous capability for future missions. The future of autonomous navigation capability is getting closer to being a reality. Credits: NASA's Goddard Space Flight Center/Stuart Snodgrass, producer
To envision why autonomous rendezvous is important in space missions, imagine this scenario: one spacecraft following another satellite, steadily closing the gap — with each vehicle traveling more than 16,000 miles per hour in the darkness of space. The satellite that is being serviced, the client, is a multi-ton craft that is running out of fuel. The fully robotic servicing satellite, the servicer, named Restore-L follows in pursuit, carrying life-extending propellant and tools.
The client, not designed to be serviced, does not have markings to making it easier for the servicer to find and secure it. The servicer has to do this on its own, using an advanced machine vision system, perfected using the data collected by Raven aboard the space station. Successful servicing first depends on the servicer’s ability to accurately locate and match speed with the client satellite.
To further complicate this scenario, the servicer is far from Earth, creating a communications delay for command and data exchange to and from space. The delay prevents ground operators from quickly and accurately providing commands to the servicer in order to prevent a possible collision within the last few feet of the rendezvous.
Therefore, the servicer has to perform relative navigation with its client, and it needs to do so autonomously (by itself, with no human guidance), and in real time.
“Two spacecraft autonomously rendezvousing is crucial for many future NASA missions and Raven is maturing this never-before-attempted technology,” said Ben Reed, deputy division director, for the Satellite Servicing Projects Division (SSPD) at NASA’s Goddard Space Flight Center in Greenbelt, Maryland — the office developing and managing this demonstration mission.
Raven will demonstrate the capability of a groundbreaking relative navigation system, housed within its carry-on luggage-sized frame, which will allow a spacecraft server to find, and if necessary, catch its intended target. Raven aims to lead to a fully developed, mature system available for future NASA missions.
Five days after launch, Raven will be removed from the unpressurized “trunk” of the SpaceX Dragon spacecraft by the Dextre robotic arm, and attached on a payload platform outside the space station. From this perch, Raven will begin providing information for the development of a mature real-time relative navigation system.
During its stay aboard the space station, Raven’s components will join forces to independently image and track incoming and outgoing visiting space station spacecraft. To do this, Raven’s sensors will feed data they “see” to a processor, which will run sets of instructions (also known as special pose algorithms) to gauge the relative distance between Raven and the spacecraft it is tracking. Then, based on these calculations, the processor will autonomously send commands that swivel the Raven module on its gimbal, or pointing system, to keep the sensors trained on the vehicle, while continuing to tracking it. While these maneuvers take place, NASA operators on the ground will evaluate how Raven’s technologies work together as a system, and will make adjustments to increase Raven’s tracking performance.
Over its two-year lifespan, Raven will test these critical technologies that are expected to support future NASA missions for decades to come. One upcoming application for this technology is its use in the Restore-L servicing mission which will navigate to refuel Landsat 7, a U.S. government Earth-observing satellite already in orbit. An additional application is the potential use for systems on NASA’s Journey to Mars. Raven is on track to advance and mature the sensors, machine vision algorithms, and processing necessary to implement a robust autonomous rendezvous and docking system for NASA. SSPD is developing and managing both the Raven and Restore-L demonstration missions.



