












 Punching Out: How to Stay Focused in Business and M&A
Punching Out: How to Stay Focused in Business and M&A It’s Only Common Sense: Just Imagine…
It’s Only Common Sense: Just Imagine…





IEEE Spectrum – We’re always impressed by the way Dr. David Zarrouk, director of Ben-Gurion University of the Negev’s Bio-Inspired and Medical Robotics Lab and a lecturer in the Department of Mechanical Engineering, manages to extract a ton of functionality from the absolute minimum of hardware in his robots. In the past, we’ve seen clever designs like a steerable robot that only uses a single motor, and a multi-jointed robot arm that uses a traveling motor to actuate all of its degrees of freedom.
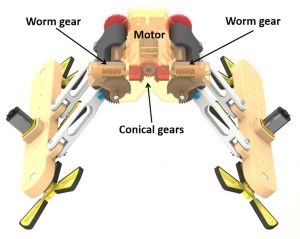
A breakdown model of RSTAR
At the 2018 IEEE International Conference on Robotics and Automation (ICRA) in Brisbane, Australia, Dr. Zarrouk presented an update to STAR, the Sprawl-Tuned Autonomous Robot, called Rising STAR, or RSTAR. The robot allows its body to move separately from its legs, changing its center of mass to help it climb over obstacles.
RSTAR is the latest in Zarrouk’s series of sprawling robots, designed to handle all kinds of terrain obstacles while minimizing cost of transport. “Sprawl” in this context refers to the robot’s legs, which are angled (adjustably) downwards and outwards from the body. RSTAR has an added degree of freedom in that its body is able to change its location relative to the legs, altering the robot’s center of mass.
It seems like a simple change, but it enables a bunch of new behaviors—not only can the robot climb over larger obstacles without flipping over, but it can also climb vertically up closely spaced walls and “crawl” through narrow gaps by adopting a legged walking gait.



