












 The Chemical Connection: Onshoring PCB Production—Daunting but Certainly Possible
The Chemical Connection: Onshoring PCB Production—Daunting but Certainly Possible It’s Only Common Sense: The Phone Is Still Mightier Than the Keyboard
It’s Only Common Sense: The Phone Is Still Mightier Than the Keyboard





Robots Lend Themselves a Hand
July 26, 2018 | Duke UniversityEstimated reading time: 2 minutes
A famous viral video about the DARPA Robotics Challenge shows all sorts of humanoid robots clumsily falling down. Bipedal movement is rather unstable, which is not only a problem for a robot trying to complete its task, but also because falling can damage a very expensive piece of machinery.
Roboticists across the globe are tackling this problem in a myriad of ways. While some look to add a series of corrective steps after a robot becomes off-balance, much like a person stumbling after tripping, Kris Hauser wants robots to be able to use the environment around them.
“If a person gets pushed toward a wall or a rail, they’ll be able to use that surface to keep themselves upright with their hands. We want robots to be able to do the same thing,” said Kris Hauser, associate professor of electrical and computer engineering and of mechanical engineering and materials science at Duke. “We believe that we’re the only research group working on having a robot dynamically choose where to place its hands to prevent falling.”
While such decisions and actions are second nature to us, programming them into a robot's reflexes is deceptively difficult. To streamline the process and save computation time, Hauser programs the software to focus only on the robot’s hip and shoulder joints.
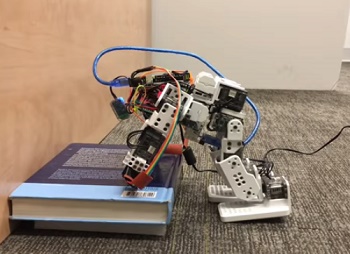
As long as the robot isn’t twisting as it falls, this creates only three angles that the stabilization algorithm has to take into account—the foot to the hip, the hip to the shoulder, and the shoulder to the hand. The robot must identify nearby surfaces within reach and then quickly calculate the best combination of angles to catch itself. The final solution minimizes impact when the robot’s hands make contact, and also minimizes the chance of its hands or feet slipping. The algorithm takes its best guess and then progressively optimizes it using a method called direct shooting.
In its current state, the robot has information about its environment fed to it and can’t navigate on its own. But in the near future, Hauser plans to upgrade to a larger robot with its own camera sensors to let it see its surroundings.
“Hopefully by the end of the year we should be doing experiments with the robot actually working in a live obstacle course,” Hauser said. “Then we’ll be trying to have the robot both dynamically map what’s around it and reason about how to protect itself from falling in arbitrary environments.”
Share on:




Testimonial
"Advertising in PCB007 Magazine has been a great way to showcase our bare board testers to the right audience. The I-Connect007 team makes the process smooth and professional. We’re proud to be featured in such a trusted publication."
Klaus Koziol - atgSuggested Items
eInfochips, NXP Announce Collaboration Focused on Global Distribution and Customer Services
10/23/2025 | PRNewswireeInfochips, an Arrow Electronics company, and a leading provider of product engineering services, and NXP® Semiconductors, the trusted partner for innovative solutions in the automotive market, announced a multi-year collaboration focused on software distribution and customer services.
Standex Electronics Unveils New Brand Identity to Power the Next Era of Engineering Innovation
10/23/2025 | PRNewswireStandex Electronics, a business segment of Standex International Corporation and a global leader in precision-engineered electronic components, has unveiled a refreshed brand identity that represents the next evolution of its engineering excellence.
Zuken Announces ZIW Americas 2026 in Dallas
10/21/2025 | ZukenZuken USA, Inc., a global leader in electrical and electronic design automation, announced Zuken Innovation World (ZIW) Americas 2026, the company’s premier global conference dedicated to advancing the future of electrical and electronic product design. ZIW 2026 will be held June 9-11 in Dallas, Texas.
Keysight Completes Acquisition of Synopsys’ Optical Solutions Group and Ansys’ PowerArtist
10/17/2025 | Keysight Technologies, Inc.Keysight Technologies, Inc., announced the completion of its acquisitions of the Optical Solutions Group from Synopsys, Inc., and PowerArtist from Ansys, Inc.
New Fil Arzola Class: Designing for the Future, and for Sustainability
10/07/2025 | Andy Shaughnessy, I-Connect007If you have not yet taken a class from Fil Arzola, you are missing out. In late October, Fil will be teaching the class "Building Sustainable Model-Based PCBs," speaking from the design perspective. I had the pleasure of catching this course at last year's IPC APEX EXPO, and I walked away with a lot to think about. I asked Fil to discuss his upcoming course. Registration is open now.