














 Trouble in Your Tank: Implementing Direct Metallization in Advanced Substrate Packaging
Trouble in Your Tank: Implementing Direct Metallization in Advanced Substrate Packaging It’s Only Common Sense: Storytelling That Sells—Stop Pitching, Start Painting Pictures
It’s Only Common Sense: Storytelling That Sells—Stop Pitching, Start Painting Pictures The Right Approach: Get Ready for ISO 9001 Version 6
The Right Approach: Get Ready for ISO 9001 Version 6





Identifying Artificial Intelligence 'Blind Spots'
January 25, 2019 | MITEstimated reading time: 6 minutes
A novel model developed by MIT and Microsoft researchers identifies instances in which autonomous systems have “learned” from training examples that don’t match what’s actually happening in the real world. Engineers could use this model to improve the safety of artificial intelligence systems, such as driverless vehicles and autonomous robots.
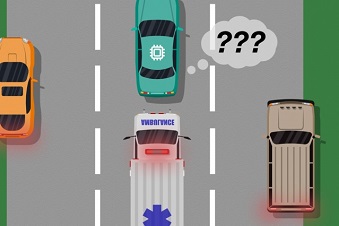
Image Caption: A model by MIT and Microsoft researchers identifies instances where autonomous cars have “learned” from training examples that don’t match what’s actually happening on the road, which can be used to identify which learned actions could cause real-world errors.
The AI systems powering driverless cars, for example, are trained extensively in virtual simulations to prepare the vehicle for nearly every event on the road. But sometimes the car makes an unexpected error in the real world because an event occurs that should, but doesn’t, alter the car’s behavior.
Consider a driverless car that wasn’t trained, and more importantly doesn’t have the sensors necessary, to differentiate between distinctly different scenarios, such as large, white cars and ambulances with red, flashing lights on the road. If the car is cruising down the highway and an ambulance flicks on its sirens, the car may not know to slow down and pull over, because it does not perceive the ambulance as different from a big white car.
In a pair of papers — presented at last year’s Autonomous Agents and Multiagent Systems conference and the upcoming Association for the Advancement of Artificial Intelligence conference — the researchers describe a model that uses human input to uncover these training “blind spots.”
As with traditional approaches, the researchers put an AI system through simulation training. But then, a human closely monitors the system’s actions as it acts in the real world, providing feedback when the system made, or was about to make, any mistakes. The researchers then combine the training data with the human feedback data, and use machine-learning techniques to produce a model that pinpoints situations where the system most likely needs more information about how to act correctly.
The researchers validated their method using video games, with a simulated human correcting the learned path of an on-screen character. But the next step is to incorporate the model with traditional training and testing approaches for autonomous cars and robots with human feedback.
“The model helps autonomous systems better know what they don’t know,” says first author Ramya Ramakrishnan, a graduate student in the Computer Science and Artificial Intelligence Laboratory. “Many times, when these systems are deployed, their trained simulations don’t match the real-world setting [and] they could make mistakes, such as getting into accidents. The idea is to use humans to bridge that gap between simulation and the real world, in a safe way, so we can reduce some of those errors.”
Co-authors on both papers are: Julie Shah, an associate professor in the Department of Aeronautics and Astronautics and head of the CSAIL’s Interactive Robotics Group; and Ece Kamar, Debadeepta Dey, and Eric Horvitz, all from Microsoft Research. Besmira Nushi is an additional co-author on the upcoming paper.
Taking Feedback
Some traditional training methods do provide human feedback during real-world test runs, but only to update the system’s actions. These approaches don’t identify blind spots, which could be useful for safer execution in the real world.
The researchers’ approach first puts an AI system through simulation training, where it will produce a “policy” that essentially maps every situation to the best action it can take in the simulations. Then, the system will be deployed in the real-world, where humans provide error signals in regions where the system’s actions are unacceptable.
Humans can provide data in multiple ways, such as through “demonstrations” and “corrections.” In demonstrations, the human acts in the real world, while the system observes and compares the human’s actions to what it would have done in that situation. For driverless cars, for instance, a human would manually control the car while the system produces a signal if its planned behavior deviates from the human’s behavior. Matches and mismatches with the human’s actions provide noisy indications of where the system might be acting acceptably or unacceptably.
Page 1 of 2
Share on:




Testimonial
"In a year when every marketing dollar mattered, I chose to keep I-Connect007 in our 2025 plan. Their commitment to high-quality, insightful content aligns with Koh Young’s values and helps readers navigate a changing industry. "
Brent Fischthal - Koh YoungSuggested Items
VIDEOTON EAS's Bulgarian Subsidiary Expands Into Automotive Products
09/15/2025 | VideotonVEAS Bulgaria, engaged in electronics manufacturing, has joined the ranks of VIDEOTON companies authorized to produce automotive products.
Variosystems Strengthens North American Presence with Southlake Relaunch 2025
09/15/2025 | VariosystemsVariosystems celebrated the relaunch of its U.S. facility in Southlake, Texas. After months of redesign and reorganization, the opening marked more than just the return to a modernized production site—it was a moment to reconnect with our teams, partners, and the local community.
Hanwha Aerospace to Collaborate with BAE Systems on Advanced Anti-jamming GPS for Guided Missiles
09/15/2025 | HanwhaHanwha Aerospace has signed a contract with BAE Systems to integrate next-generation, anti-jamming Global Positioning System (GPS) technology into Hanwha Aerospace’s Deep Strike Capability precision-guided weapon system.
EV Group Achieves Breakthrough in Hybrid Bonding Overlay Control for Chiplet Integration
09/12/2025 | EV GroupEV Group (EVG), a leading provider of innovative process solutions and expertise serving leading-edge and future semiconductor designs and chip integration schemes, today unveiled the EVG®40 D2W—the first dedicated die-to-wafer overlay metrology platform to deliver 100 percent die overlay measurement on 300-mm wafers at high precision and speeds needed for production environments. With up to 15X higher throughput than EVG’s industry benchmark EVG®40 NT2 system designed for hybrid wafer bonding metrology, the new EVG40 D2W enables chipmakers to verify die placement accuracy and take rapid corrective action, improving process control and yield in high-volume manufacturing (HVM).
AV Switchblade 600 Loitering Munition System Achieves Pivotal Milestone with First-Ever Air Launch from MQ-9A
09/12/2025 | BUSINESS WIREAeroVironment, Inc. (AV) a global leader in intelligent, multi-domain autonomous systems, announced its Switchblade 600 loitering munition system (LMS) has achieved a significant milestone with its first-ever air launch from an MQ-9A Reaper Unmanned Aircraft System (UAS).