














 Dan’s Biz Bookshelf: Four Important Books You Need to Read (Not Just Say You Have)
Dan’s Biz Bookshelf: Four Important Books You Need to Read (Not Just Say You Have) The Marketing Minute: Cracking the Code of Technical Marketing
The Marketing Minute: Cracking the Code of Technical Marketing





Roach-like Robots Run, Climb and Communicate with People
June 15, 2016 | NSFEstimated reading time: 7 minutes
Insects make themselves at home in the most unwelcoming terrain: on steep inclines, in dark crevices, under shaky rubble.
While their ability to go just about anywhere can be disturbing at times, electrical engineer Ronald Fearing sees their talent as inspiration for a special breed of robots that can fit in your hand and help in emergency situations.
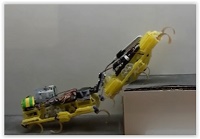
Ronald Fearing and graduate student Carlos Casarez of the University of California, Berkeley recently tested a strategy for robots that are designed to run fast, not to climb or step over obstacles. They outfitted two VelociRoACH robots with radios, leg position sensors, gyroscopes and accelerometers to help the robots orient themselves, along with a small tether and winch system. The researchers investigated “motion primitives” that would allow the robots to mount a step. Like small words that may be arranged to make sentences with many different meanings, motion primitives are simple actions that may be combined in different ways to accomplish a variety of tasks. The researchers demonstrated that by creating the right primitives, and combining them in the right order, the robot team could work together to reach the top of the step, then disconnect and continue exploring separately (watch the robots cooperate). Image credit: Carlos Casarez, Department of Mechanical Engineering, University of California, Berkeley
“Living in earthquake country in California,” Fearing says, “it’s frustrating to know people will be trapped after a building collapse. We have an indeterminate amount of time to find someone before they may die. Small robots would allow us to get in and communicate fairly quickly.”
Since the 1990s, Fearing has been developing biomimetic robots capable of remarkable feats of speed and maneuverability. With his team at the University of California, Berkeley, he designs robots to share traits with insects, lizards and other animals.
With NSF funding through the National Robotics Initiative (NRI), Fearing now creates biologically inspired teams of robots that can cover rough ground while sending information to and receiving guidance from search and rescue personnel.
“The NRI project allows us to see how robots can do something useful, with robots working together and with people as well,” Fearing says.
Quick as a cockroach
The indomitable cockroach serves as one insect model for his group’s designs. Fearing and his colleagues made a series of robots about 3-10 centimeters long (roughly 1-4 inches) that move like the common cockroach Periplaneta Americana, sharing its gait stride frequency and other dynamics.
To create the miniRoACH (RObotic Autonomous Crawling Hexapod), Fearing and graduate students Aaron Hoover and Erik Steltz invented using the smart composite microstructure (SCM) process. SCM is a rapid prototyping method in which rigid structure and movable joints are laser cut from a single sheet of material and then folded into position. Using this method, designers can create complicated machines, such as robots, quickly and inexpensively. (Watch construction of a robot using SCM.)
The 3 cm miniRoACH, is slow. Fearing and graduate student Duncan Haldane, with fellow students Fernando Garcia Bermudez and Kevin Peterson, adapted the movement of the original RoACH for the larger VelociRoACH, a 10 cm robot that can run almost 3 meters per second (approximately 6 mph).
The VelociRoACH research was made possible by an NSF Integrative Graduate Education and Research Traineeship (IGERT) award to teach biology and engineering students to learn from natural design.
To allow another model, the X2-VelociRoACH, to go faster than nature’s design, Fearing and Haldane added a bigger motor and more power to increase stride frequency. In 2015, the little robot reached speeds up to 5 meters per second (approximately 11 mph), making it the fastest legged robot relative to its size. (Watch the X2-VelociRoACH zoom by.)
Having mastered fast movement in flat, open environments, the researchers’ current challenge involves locomotion in tough environments with little open space, obstacles everywhere and no clear paths through. The robots need to explore in order to reach their destinations.
Robots offer a helping tether
Typical rescue robots are designed for particular terrain, require costly motors and joints, and are much larger and heavier (weighing several kilograms rather than the 50 grams of VelociRoACH). Fearing and his collaborators use less complicated, more versatile designs for robots that work together. One key question guides that focus on adaptability and robotic cooperation: What if robots encounter an obstacle they’ve never seen before?
“If you think about people, if you send a single person to explore and they encounter a 12-foot high fence, they are stuck,” Fearing says. “But if you send two people, the first can boost the second one up, and then the second can pull the first one up.”
Fearing and his team study strategies that teams of robots can use to overcome a variety of obstacles. Ants provided some inspiration, as they often collaborate (for example, by stepping on each other) to get where they need to go.
Together with graduate student Carlos Casarez, Fearing recently tested a strategy for robots that aren’t specifically designed to climb or step over obstacles. The researchers outfitted two VelociRoACH robots with radios, leg-position sensors, gyroscopes and accelerometers to help them orient themselves. They also gave the VelociRoACHes a small tether and winch system, giving them the ability to latch onto and pull one another. The team then investigated how “motion primitives” — simple, combinable actions — could allow the VelociRoACHes to mount a step together.
Like small words arranged to create entire sentences, motion primitives can be combined to accomplish a variety of tasks. The researchers demonstrated that with the right primitives, arranged in the right order, the robot team couldcooperate to reach the top of a step, then disconnect and continue exploring separately.
Page 1 of 2
Share on:




Testimonial
"In a year when every marketing dollar mattered, I chose to keep I-Connect007 in our 2025 plan. Their commitment to high-quality, insightful content aligns with Koh Young’s values and helps readers navigate a changing industry. "
Brent Fischthal - Koh YoungSuggested Items
Weaning the U.S. Military Off a Tablet Supply Chain That Leads to China
09/08/2025 | Jim Will, USPAETablet computers are essential to how our military fights, moves and sustains, but these devices are built on a fragile global supply chain with strong ties to China. Building domestic manufacturing to eliminate this vulnerability is feasible if we tap into the information and capabilities that already exist and create strong demand for tablets produced by trusted and assured sources.
Fresh PCB Concepts: Designing for Success at the Rigid-flex Transition Area
08/28/2025 | Team NCAB -- Column: Fresh PCB ConceptsRigid-flex PCBs come in all shapes and sizes. Manufacturers typically use fire-retardant, grade 4 (FR-4) materials in the rigid section and flexible polyimide materials in the flex region. Because of the small size, some rigid-flex PCBs, like those for hearing aid devices, are among the most challenging to manufacture. However, regardless of its size, we should not neglect the transition area between the rigid and flexible material.
Semiconductors Get Magnetic Boost with New Method from UCLA Researchers
07/31/2025 | UCLA NewsroomA new method for combining magnetic elements with semiconductors — which are vital materials for computers and other electronic devices — was unveiled by a research team led by the California NanoSystems Institute at UCLA.
Japan’s OHISAMA Project Aims to Beam Solar Power from Space This Year
07/14/2025 | I-Connect007 Editorial TeamJapan could be on the cusp of making history with its OHISAMA project in its quest to become the first country to transmit solar power from space to Earth, The Volt reported.
The Big Picture: Our Big ‘Why’ in the Age of AI
06/25/2025 | Mehul Davé -- Column: The Big PictureWith advanced technology, Tesla, Google, Microsoft, and OpenAI can quickly transform life as we know it. Several notable artificial intelligence (AI) studies, including the 2024 McKinsey Global Survey on AI, have offered insights into AI’s adoption, impact, and trajectory. The McKinsey study revealed that AI adoption continues to grow, with 50% of respondents reporting using AI in at least one business area.