














 American Made Advocacy: Smart Policies Can Ensure AI Data Centers Are Secure
American Made Advocacy: Smart Policies Can Ensure AI Data Centers Are Secure Beyond the Board: Early Engagement Means Faster Prototyping for Defense Programs
Beyond the Board: Early Engagement Means Faster Prototyping for Defense Programs Defense Speak Interpreted: The Autonomous Plane Battle—Skyborg Vs. Loyal Wingman
Defense Speak Interpreted: The Autonomous Plane Battle—Skyborg Vs. Loyal Wingman





Robots Lend Themselves a Hand
July 26, 2018 | Duke UniversityEstimated reading time: 2 minutes
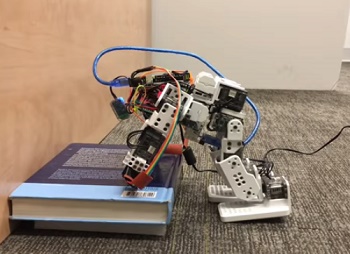
A famous viral video about the DARPA Robotics Challenge shows all sorts of humanoid robots clumsily falling down. Bipedal movement is rather unstable, which is not only a problem for a robot trying to complete its task, but also because falling can damage a very expensive piece of machinery.
Roboticists across the globe are tackling this problem in a myriad of ways. While some look to add a series of corrective steps after a robot becomes off-balance, much like a person stumbling after tripping, Kris Hauser wants robots to be able to use the environment around them.
“If a person gets pushed toward a wall or a rail, they’ll be able to use that surface to keep themselves upright with their hands. We want robots to be able to do the same thing,” said Kris Hauser, associate professor of electrical and computer engineering and of mechanical engineering and materials science at Duke. “We believe that we’re the only research group working on having a robot dynamically choose where to place its hands to prevent falling.”
While such decisions and actions are second nature to us, programming them into a robot's reflexes is deceptively difficult. To streamline the process and save computation time, Hauser programs the software to focus only on the robot’s hip and shoulder joints.
As long as the robot isn’t twisting as it falls, this creates only three angles that the stabilization algorithm has to take into account—the foot to the hip, the hip to the shoulder, and the shoulder to the hand. The robot must identify nearby surfaces within reach and then quickly calculate the best combination of angles to catch itself. The final solution minimizes impact when the robot’s hands make contact, and also minimizes the chance of its hands or feet slipping. The algorithm takes its best guess and then progressively optimizes it using a method called direct shooting.
In its current state, the robot has information about its environment fed to it and can’t navigate on its own. But in the near future, Hauser plans to upgrade to a larger robot with its own camera sensors to let it see its surroundings.
“Hopefully by the end of the year we should be doing experiments with the robot actually working in a live obstacle course,” Hauser said. “Then we’ll be trying to have the robot both dynamically map what’s around it and reason about how to protect itself from falling in arbitrary environments.”
Share on:




Testimonial
"In a year when every marketing dollar mattered, I chose to keep I-Connect007 in our 2025 plan. Their commitment to high-quality, insightful content aligns with Koh Young’s values and helps readers navigate a changing industry. "
Brent Fischthal - Koh YoungSuggested Items
TTCI Brings Hands-On Test Engineering and IPC Training Expertise to PCB Carolina 2025
10/31/2025 | The Test Connection Inc.The Test Connection Inc. (TTCI), a trusted provider of electronic test and manufacturing solutions, and The Training Connection LLC (TTC-LLC) will exhibit at PCB Carolina on Wednesday, November 12, 2025, at the McKimmon Center at NC State University in Raleigh, North Carolina. Attendees can visit Table 4 to say hello to Bert Horner and Bill Graver, and learn more about their test engineering services and technical training programs.
BTU International Earns 2025 Step-by-Step Excellence Award for Its Aqua Scrub™ Flux Management System
10/29/2025 | BTU International, Inc.BTU International, Inc., a leading supplier of advanced thermal processing equipment for the electronics manufacturing market, has been recognized with a 2025 Step-by-Step Excellence Award (SbSEA) for its Aqua Scrub™ Flux Management Technology, featured on the company’s Pyramax™ and Aurora™ reflow ovens.
China Plus One: Vietnam and Thailand Manufacturing Solutions
10/28/2025 | Marcy LaRont, PCB007 MagazineU.S. electronics manufacturing companies are weighing the “China Plus One” solution as they strategize how best to mitigate the ever-increasing pressures and costs of manufacturing in China. Several global markets, particularly Thailand and Vietnam, are seeing significant growth in their sectors. This article breaks down the pros and cons of each market, including a look at U.S. tariffs and how each country is addressing a significant skilled labor gap to support their electronics manufacturing goals.
eInfochips, NXP Announce Collaboration Focused on Global Distribution and Customer Services
10/23/2025 | PRNewswireeInfochips, an Arrow Electronics company, and a leading provider of product engineering services, and NXP® Semiconductors, the trusted partner for innovative solutions in the automotive market, announced a multi-year collaboration focused on software distribution and customer services.
Standex Electronics Unveils New Brand Identity to Power the Next Era of Engineering Innovation
10/23/2025 | PRNewswireStandex Electronics, a business segment of Standex International Corporation and a global leader in precision-engineered electronic components, has unveiled a refreshed brand identity that represents the next evolution of its engineering excellence.