












 It’s Only Common Sense: Hire for Hunger, Train for Skill
It’s Only Common Sense: Hire for Hunger, Train for Skill Dan’s Biz Bookshelf: ‘The 'NVIDIA Way: Jensen Huang and the Making of a Tech Giant’
Dan’s Biz Bookshelf: ‘The 'NVIDIA Way: Jensen Huang and the Making of a Tech Giant’





These New Soft Actuators Could Make Soft Robots Less Bulky
October 15, 2019 | University of California - San DiegoEstimated reading time: 2 minutes
Engineers at the University of California San Diego have developed a way to build soft robots that are compact, portable and multifunctional. The advance was made possible by creating soft, tubular actuators whose movements are electrically controlled, which makes them easy to integrate with small electronic components.
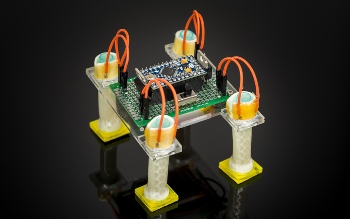
As a proof of concept, engineers used these new actuators to build a soft, battery-powered robot that can walk untethered on flat surfaces and move objects. They also built a soft gripper that can grasp and pick up small objects.
The team, led by UC San Diego mechanical and aerospace engineering professor Shengqiang Cai, published the work Oct. 11 in Science Advances.
A problem with most soft actuators is that they come with bulky setups. That’s because their movements are controlled by pumping either air or fluids through chambers inside. So building robots with these types of actuators would require tethering them to pumps, large power sources and other specialized equipment.
In the current study, UC San Diego engineers created soft actuators that are controlled with electricity. “This feature makes our tubular actuators compatible with most low-cost, commercially available electronic devices and batteries,” Cai said.
The actuators are made from a type of material used for artificial muscles in robots, called liquid crystal elastomers. They are composed of liquid crystal molecules embedded in a stretchy polymer network. What’s special about these materials is they change shape, move and contract in response to stimuli such as heat or electricity—similar to how muscles contract in response to signals from nerve cells.
To construct each actuator, engineers sandwiched three heating wires between two thin films of liquid crystal elastomer. The material is then rolled into a tube, pre-stretched and exposed to UV light.
Each heating wire can be controlled independently to make the tube bend in six different directions. When an electric current is passed through one or two of the wires, it heats up part of the tube and makes it bend in the direction of those wires. When a current is passed through all three wires, the entire tube contracts, shortening in length. When the electricity is turned off, the tube slowly cools down and returns to its original shape.
“Using an externally applied electrical potential makes it easy to program the position of each tubular actuator,” said first author Qiguang He, a mechanical and aerospace engineering Ph.D. student at the UC San Diego Jacobs School of Engineering.
Combining multiple actuators together enabled engineers to build different types of soft robots. They built an untethered, walking robot using four actuators as legs. This robot is powered by a small lithium/polymer battery on board. They also built a soft gripper using three actuators as fingers.
Each robot has an on-board microcontroller in which engineers programmed a sequence of electrically controlled motions for the actuators. This allows the robots to move independently.
The team is now working on making soft actuators that can move faster. The current actuators take about 30 seconds to fully bend and contract, and up to four minutes to return to their original shapes. That’s because the material takes a bit of time to fully heat up and cool down. The ultimate goal is to make actuators that can contract and relax as quickly as human muscles, He said.
Share on:




Testimonial
"We’re proud to call I-Connect007 a trusted partner. Their innovative approach and industry insight made our podcast collaboration a success by connecting us with the right audience and delivering real results."
Julia McCaffrey - NCAB GroupSuggested Items
Spirit Electronics Named Authorized Distributor for Microchip Technology
04/17/2026 | Globe NewswireSpirit Electronics, a vertically integrated electronics design and manufacturing solutions provider serving the military and aerospace markets, announced that it has been designated as an authorized distributor for the Americas for Microchip Technology, a broadline supplier of semiconductors committed to making innovative design easier through total system solutions.
FTG Reports Strong Q1 2026 Results with Double-Digit Revenue Growth and Rising Backlog
04/09/2026 | Firan Technology Group CorporationIn Q1 2026, the Corporation grew organically. FTG is strategically investing its capital in ways that will drive increased shareholder returns for the future in both the near term and long term. The company's achievements in Q1 2026 demonstrate this commitment, laying a strong foundation for future growth.
EMI Promotes David Vue to Lead Military and Aerospace Division
03/31/2026 | Express Manufacturing Inc.Express Manufacturing, Inc. (EMI), a global electronics manufacturing services (EMS) provider, announced the promotion of David Vue to Military and Aerospace Division Manager.
SP Manufacturing Expands into UK Avionics Sector, Secures First Customer Engagement
03/30/2026 | SP ManufacturingSP Manufacturing Pte Ltd., a leader in comprehensive electronic manufacturing services, announced its expansion into the avionics sector in the United Kingdom, marked by the successful onboarding of its first UK-based avionics customer.
Honeywell Aerospace, Defense Department Sign Deal to Boost Defense Tech Production
03/27/2026 | PRNewswireHoneywell announced it has signed a groundbreaking supplier framework agreement with the U.S. Department of War (DoW) to rapidly increase the production of critical defense technologies. This agreement includes a $500 million multi-year investment to upgrade the company's production capacity.