












 It’s Only Common Sense: Hire for Hunger, Train for Skill
It’s Only Common Sense: Hire for Hunger, Train for Skill Dan’s Biz Bookshelf: ‘The 'NVIDIA Way: Jensen Huang and the Making of a Tech Giant’
Dan’s Biz Bookshelf: ‘The 'NVIDIA Way: Jensen Huang and the Making of a Tech Giant’





Rebel Robot Helps Researchers Understand Human-Machine Cooperation
October 24, 2019 | University of BristolEstimated reading time: 2 minutes
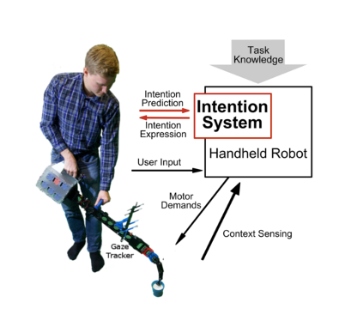
In a new twist on human-robot research, computer scientists at the University of Bristol have developed a handheld robot that first predicts then frustrates users by rebelling against their plans, thereby demonstrating an understanding of human intention.
In an increasingly technological world, cooperation between humans and machines is an essential aspect of automation. This new research shows frustrating people on purpose is part of the process of developing robots that better cooperate with users.
The team at Bristol has developed intelligent, handheld robots which complete tasks in collaboration with the user. In contrast to conventional power tools, that know nothing about the tasks they perform and are fully under the control of users, the handheld robot holds knowledge about the task and can help through guidance, fine-tuned motion, and decisions about task sequences.
While this helps fulfill tasks quicker and with higher accuracy, users can get irritated when the robot's decisions are not in line with their own plans.
The latest research in this space by PhD candidate Janis Stolzenwald and Professor Walterio Mayol-Cuevas, from the University of Bristol's Department of Computer Science, explores the use of intelligent tools that can bias their decisions in response to the intention of users.
This research is a new and interesting twist on human-robot research as it aims to first predict what users want and then go against these plans.
Professor Mayol-Cuevas said: "If you are frustrated with a machine that is meant to help you, this is easier to identify and measure than the often elusive signals of human-robot cooperation. If the user is frustrated when we instruct the robot to rebel against their plans, we know the robot understood what they wanted to do."
"Just as short-term predictions of each others' actions are essential to successful human teamwork, our research shows integrating this capability in cooperative robotic systems is essential to successful human-machine cooperation."
For the study, researchers used a prototype that can track the user’s eye gaze and derive short-term predictions about intended actions through machine learning. This knowledge is then used as a basis for the robot’s decisions such as where to move next.
The Bristol team trained the robot in the study using a set of over 900 training examples from a pick and place task carried out by participants.
Core to this research is the assessment of the intention-prediction model. The researchers tested the robot for two cases: obedience and rebellion. The robot was programmed to follow or disobey the predicted intention of the user. Knowing the user's aims gave the robot the power to rebel against their decisions. The difference in frustration responses between the two conditions served as evidence for the accuracy of the robot's predictions, thus validating the intention-prediction model.
Janis Stolzenwald, a PhD student sponsored by the German Academic Scholarship Foundation and the UK's EPSRC, conducted the user experiments and identified new challenges for the future. He said: "We found that the intention model is more effective when the gaze data is combined with task knowledge. This raises a new research question: how can the robot retrieve this knowledge? We can imagine learning from demonstration or involving another human in the task."
In preparation for this new challenge, the researchers are currently exploring shared control, interaction and new applications within their studies about remote collaboration through the handheld robot. A maintenance task serves as a user experiment, where a handheld robot user receives assistance through an expert who remotely controls the robot.
Share on:




Testimonial
"Advertising in PCB007 Magazine has been a great way to showcase our bare board testers to the right audience. The I-Connect007 team makes the process smooth and professional. We’re proud to be featured in such a trusted publication."
Klaus Koziol - atgSuggested Items
Long Night of Research 2026: AT&S Brings Artificial Intelligence to Life
04/15/2026 | AT&SWhen the Long Night of Research takes place throughout Austria on Friday, April 24, setting an example for the country’s innovative strength, AT&S will be there with a special highlight.
Foxconn Recognized as Top 100 Global Innovators 2026
04/14/2026 | FoxconnHon Hai Technology Group (Foxconn) has been named in Clarivate’s Top 100 Global Innovators 2026, a milestone for the ninth year running and as the accelerating role of artificial intelligence stood out in innovation activity among peers in the prestigious ranking.
Carbice Awarded Multi-Million Dollar U.S. Navy Contract for Thermal Assembly Joint Technology
04/14/2026 | PRNewswireCarbice, a U.S.-based manufacturer and supplier of novel multifunctional assembly joint technologies, has been awarded a multi-million dollar contract by the U.S. Navy's Office of Naval Research.
Seoul Semiconductor Recognized as a High-Tech Enterprise in Vietnam
04/09/2026 | BUSINESS WIRESeoul Semiconductor Co., Ltd., a leading global opto-semiconductor company, announced that it has officially been granted the “High-Tech Enterprise” certification in Vietnam.
Jon Peddie Research Releases New Photonic AI Processors Report
04/07/2026 | Jon Peddie ResearchJon Peddie Research (JPR), the leading research and consulting firm for graphics and AI technologies, has released its latest report on AI, the Photonic AI Processors report covering developments during the third quarter of 2025.