













 The Marketing Minute: Cracking the Code of Technical Marketing
The Marketing Minute: Cracking the Code of Technical Marketing Trouble in Your Tank: Implementing Direct Metallization in Advanced Substrate Packaging
Trouble in Your Tank: Implementing Direct Metallization in Advanced Substrate Packaging





The First Autonomous, Entirely Soft Robot
August 25, 2016 | Harvard UniversityEstimated reading time: 3 minutes
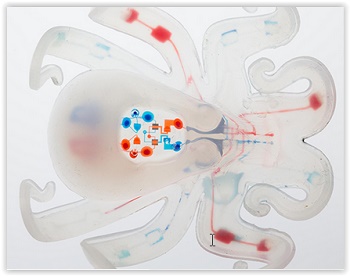
A team of Harvard University researchers with expertise in 3-D printing, mechanical engineering, and microfluidics has demonstrated the first autonomous, untethered, entirely soft robot. This small, 3-D-printed robot — nicknamed the “octobot” — could pave the way for a new generation of such machines.
Soft robotics could help revolutionize how humans interact with machines. But researchers have struggled to build entirely compliant robots. Electric power and control systems — such as batteries and circuit boards — are rigid, and until now soft-bodied robots have been either tethered to an off-board system or rigged with hard components.
Robert Wood, the Charles River Professor of Engineering and Applied Sciences, and Jennifer A. Lewis, the Hansjorg Wyss Professor of Biologically Inspired Engineering at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), led the research. Lewis and Wood are also core faculty members of the Wyss Institute for Biologically Inspired Engineering at Harvard University.
“One longstanding vision for the field of soft robotics has been to create robots that are entirely soft, but the struggle has always been in replacing rigid components like batteries and electronic controls with analogous soft systems and then putting it all together,” said Wood. “This research demonstrates that we can easily manufacture the key components of a simple, entirely soft robot, which lays the foundation for more complex designs.”
“Through our hybrid assembly approach, we were able to 3-D print each of the functional components required within the soft robot body, including the fuel storage, power, and actuation, in a rapid manner,” said Lewis. “The octobot is a simple embodiment designed to demonstrate our integrated design and additive fabrication strategy for embedding autonomous functionality.”
Octopuses have long been a source of inspiration in soft robotics. These curious creatures can perform incredible feats of strength and dexterity with no internal skeleton.
Harvard’s octobot is pneumatic-based, and so is powered by gas under pressure. A reaction inside the bot transforms a small amount of liquid fuel (hydrogen peroxide) into a large amount of gas, which flows into the octobot’s arms and inflates them like balloons.
“Fuel sources for soft robots have always relied on some type of rigid components,” said Michael Wehner, a postdoctoral fellow in the Wood lab and co-first author of the paper. “The wonderful thing about hydrogen peroxide is that a simple reaction between the chemical and a catalyst — in this case platinum — allows us to replace rigid power sources.”
To control the reaction, the team used a microfluidic logic circuit based on pioneering work by co-author and chemist George Whitesides, the Woodford L. and Ann A. Flowers University Professor and a core faculty member of the Wyss. The circuit, a soft analog of a simple electronic oscillator, controls when hydrogen peroxide decomposes to gas in the octobot.
“The entire system is simple to fabricate. By combining three fabrication methods — soft lithography, molding, and 3-D printing — we can quickly manufacture these devices,” said Ryan Truby, a graduate student in the Lewis lab and co-first author of the paper.
The simplicity of the assembly process paves the way for designs of greater complexity. Next, the Harvard team hopes to design an octobot that can crawl, swim, and interact with its environment.
“This research is a proof of concept,” Truby said. “We hope that our approach for creating autonomous soft robots inspires roboticists, material scientists, and researchers focused on advanced manufacturing.”
The paper was co-authored by Daniel Fitzgerald of the Wyss Institute and Bobak Mosadegh of Cornell University. The research was supported by the National Science Foundation through the Materials Research Science and Engineering Center at Harvard and by the Wyss Institute.
Share on:




Testimonial
"Our marketing partnership with I-Connect007 is already delivering. Just a day after our press release went live, we received a direct inquiry about our updated products!"
Rachael Temple - AlltematedSuggested Items
BLT Joins Microchip Partner Program as Design Partner
09/17/2025 | BUSINESS WIREBLT, a U.S.-owned and operated engineering design services firm announced it has joined the Microchip Design Partner Program.
HyRel Technologies Showcases Summer Intern Success Through Hands-On Innovation
09/16/2025 | HyRel TechnologiesHyRel Technologies, a global provider of quick turn semiconductor modification solutions, proudly highlights the accomplishments of its two recent summer interns, Danny Hoang and Nisarg Jadav.
ASM Technologies Limited signs MoU with the Guidance, Government of Tamilnadu to Expand Design-Led Manufacturing capabilities for ESDM
09/15/2025 | ASM TechnologiesASM Technologies Limited, a pioneer in Design- Led Manufacturing in the semiconductor and automotive industries, announced signing of Memorandum of Understanding (MoU) with the Guidance, Government of Tamilnadu whereby it will invest Rs. 250 crores in the state to expand its ESDM related Design-Led Manufacturing and precision engineering capacity. ASM Technologies will acquire 5 acres of land from the Government of Tamilnadu to set up a state-of-the-art design facility in Tamil Nadu's growing technology manufacturing ecosystem, providing a strong strategic advantage and long-term benefits for ASM.
Intel Announces Key Leadership Appointments to Accelerate Innovation and Strengthen Execution
09/09/2025 | Intel CorporationIntel Corporation today announced a series of senior leadership appointments that support the company’s strategy to strengthen its core product business, build a trusted foundry, and foster a culture of engineering across the business.
Cadence to Acquire Hexagon’s Design & Engineering Business
09/08/2025 | Cadence Design SystemsCadence announced it has entered into a definitive agreement to acquire the Design & Engineering (D&E) business of Hexagon AB, which includes its MSC Software business—a pioneer in engineering simulation and analysis solutions.