











 Driving Innovation: Mechanical and Optical Processes During Rigid-flex Production
Driving Innovation: Mechanical and Optical Processes During Rigid-flex Production It’s Only Common Sense: Your Biggest Competitor Is Complacency
It’s Only Common Sense: Your Biggest Competitor Is Complacency The Chemical Connection: Onshoring PCB Production—Daunting but Certainly Possible
The Chemical Connection: Onshoring PCB Production—Daunting but Certainly Possible





A Robotic Leg, Born Without Prior Knowledge, Learns to Walk
March 13, 2019 | USC ViterbiEstimated reading time: 4 minutes
For a newborn giraffe or wildebeest, being born can be a perilous introduction to the world—predators lie in wait for an opportunity to make a meal of the herd’s weakest member. This is why many species have evolved ways for their juveniles to find their footing within minutes of birth.
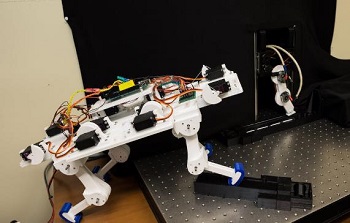
It’s an astonishing evolutionary feat that has long inspired biologists and roboticists. Now a team of USC researchers at the USC Viterbi School of Engineering believe they have become the first to create an AI-controlled robotic limb driven by animal-like tendons that can be tripped up and then recover within the time of the next footfall, a task for which the robot was never explicitly programmed to do.
Francisco J. Valero-Cuevas, a professor of Biomedical Engineering and professor of Biokinesiology & Physical Therapy at USC, in a project with USC Viterbi School of Engineering doctoral student Ali Marjaninejad and two other doctoral students—Darío Urbina-Meléndez and Brian Cohn, has developed a bio-inspired algorithm that can learn a new walking task by itself after only 5 minutes of unstructured play, and then adapt to other tasks without any additional programming.
Their article, outlined in the March cover article of Nature Machine Intelligence, opens exciting possibilities for understanding human movement and disability, creating responsive prosthetics, and robots that can interact with complex and changing environments like space exploration and search-and-rescue.
“Nowadays, it takes the equivalent of months or years of training for a robot to be ready to interact with the world, but we want to achieve the quick learning and adaptations seen in nature,” said senior author Valero-Cuevas, who also has appointments in computer science, electrical and computer engineering, aerospace and mechanical engineering and neuroscience at USC.
Marjaninejad, a doctoral candidate in the Department of Biomedical Engineering at USC, and the paper’s lead author, said this breakthrough is akin to the natural learning that happens in babies. Marjaninejad explains, the robot was first allowed to understand its environment in a process of free play (or what is known as ‘motor babbling’).
“These random movements of the leg allow the robot to build an internal map of its limb and its interactions with the environment,” said Marjaninejad.
The paper’s authors say that, unlike most current work, their robots learn-by-doing, and without any prior or parallel computer simulations to guide learning.
Marjaninejad also added this is particularly important because programmers can predict and code for multiple scenarios, but not for every possible scenario—thus pre-programmed robots are inevitably prone to failure.
“However, if you let these [new] robots learn from relevant experience, then they will eventually find a solution that, once found, will be put to use and adapted as needed. The solution may not be perfect, but will be adopted if it is good enough for the situation. Not every one of us needs or wants—or is able to spend the time and effort— to win an Olympic medal,” Marjaninejad said.
Page 1 of 2
Share on:




Testimonial
"In a year when every marketing dollar mattered, I chose to keep I-Connect007 in our 2025 plan. Their commitment to high-quality, insightful content aligns with Koh Young’s values and helps readers navigate a changing industry. "
Brent Fischthal - Koh YoungSuggested Items
The Republic of Korea Selects L3Harris for Airborne Early Warning and Control Aircraft Program
10/20/2025 | BUSINESS WIREL3Harris Technologies has received a contract to deliver modified Bombardier Global 6500 airborne early warning and control (AEW&C) aircraft to the Republic of Korea Air Force.
Molex Announces Agreement to Acquire Smiths Interconnect
10/17/2025 | MolexMolex, a leading global electronics connectivity innovator, announced that it has signed an agreement to acquire Smiths Interconnect.
American Standard Circuits Achieves Successful AS9100 Recertification
10/14/2025 | American Standard CircuitsAmerican Standard Circuits (ASC), a leading manufacturer of advanced printed circuit boards, proudly announces the successful completion of its AS9100 recertification audit. This milestone reaffirms ASC’s ongoing commitment to the highest levels of quality, reliability, and process control required to serve aerospace, defense, space, and other mission-critical industries.
Kodiak Assembly Solutions Renews ITAR Registration, Providing Secure and Compliant Manufacturing for Defense & Aerospace
09/25/2025 | Kodiak Assembly SolutionsKodiak Assembly Solutions LLLP, a leading electronics contract manufacturer, has successfully renewed its ITAR (International Traffic in Arms Regulations) registration.
Cyient DLM, A Voice from the Frontlines
09/24/2025 | Arpita Das, Global Electronics AssociationOnce seen as a low-cost, build-to-print destination, India’s EMS sector is rapidly emerging as a global hub for high-reliability electronics, particularly in strategic sectors like aerospace, defense, and medical. As such, we highlight some companies that exemplify the strength and potential of Indian manufacturing.