















 SMT Perspectives & Prospects: Artificial Intelligence Part 6: Data Module 1
SMT Perspectives & Prospects: Artificial Intelligence Part 6: Data Module 1 Standard of Excellence: Overcoming Service Failures—The Art of the Apology
Standard of Excellence: Overcoming Service Failures—The Art of the Apology Nolan’s Notes: Tariffs, Technologies, and Optimization
Nolan’s Notes: Tariffs, Technologies, and Optimization





The Relationship Between Throughput and the Number of Placement Heads
December 31, 1969 |Estimated reading time: 5 minutes
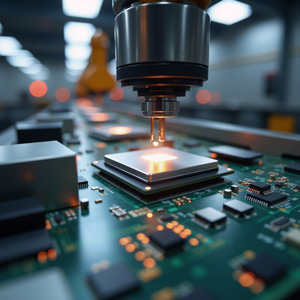
More heads for a pick-and-place machine do not always add up to greater throughput. By Gary Burroughs and Gerry Padnos

At first glance, increasing the number of heads on a pick-and-place machine seems to be the best way to increase throughput. However, placement heads are only one of many factors contributing to overall placement rate. Positioning system, centering, feeder advance, nozzle-change time, placement sequence optimization, feeder location and printed circuit board (PCB) transfer time are a few other factors that determine actual throughput. And, as with most throughput decisions, there is a point of diminishing returns to consider.
Pick-and-place machine manufacturers offer different head designs with advantages and disadvantages to each. Common head designs are turret (chipshooters), revolver and simple linear-ganged-type heads/nozzles.
Head Designs
Turret-head machines are a collection of multiple heads on a rotary turret. The turret rotates in a horizontal plane, picking parts at one side, placing them on the other and centering in between. Turret designs are the most common for high-speed chipshooters. However, they require significant floor space as the number of heads (and thus the turret size) increases, and can be difficult to changeover between jobs.

Revolver-head machines are similar to turret machines, having several heads attached to a rotating circular base. The difference is that the heads on the turret are parallel to the PCB, while the heads on a revolver machine are vertical, like spokes on a hub. The revolver head rotates in a vertical plane, picking a component for each head at the bottom, centering during the rotation and placing. Revolver heads generally are more compact than turret heads, but the two-step "collect-and-place" principle means they cannot run in continuous high-speed operation. Additionally, they use complex software algorithms that can be difficult to troubleshoot.
In the simple ganged-head system, several placement heads are assembled together on a X-Y positioning gantry with heads moving up and down to pick and place components. These designs use anywhere from one to 16 heads on a single beam. There is no rotation of the head base. In general, the heads can either individually or collectively pick parts (gang picks). Gang picking to reduce the total pick time is one task that neither turret nor revolver head machines can accomplish. Using current designs, it is nearly impossible to place more than one component simultaneously (gang place), because it requires perfect placement location alignment on the PCB with the head spacing.
This article focuses on the ganged-type linear designs, the most popular type found on mid- to high-volume systems. Tables 1 and 2 indicate the results of a simulation on how placement speed is affected by the number of heads. Using one to four heads results in greater than 10 percent improvement for each additional head. With the fifth head, the improvement drops to 8 percent and continues to fall rapidly.
Cycle Time
Explanations for this decreasing return can be found in the four major steps that make up pick-and-place cycle time:
- Pick time. Adding more heads will not increase the pick time (assuming the heads are capable of simultaneously picking parts). Note that both revolver and turret heads pick all parts individually. This time is assumed to be 100 milliseconds for this article.
- X-Y travel time from pick to place position. Again, this does not depend on the number of heads. This time is assumed to be 140 milliseconds.
- Placement time, including X-Y travel, for first through last placement. This time increases with the number of heads because machines cannot place parts simultaneously. The PCB is not designed to the machine's head configuration. It is assumed to take 140 milliseconds for each part. If a machine placed one part, the placing time is 140 milliseconds; for eight parts, it would take 1,120 milliseconds.
- X-Y travel time from the last position to pick position. This does not depend on the number of heads. Again, 140 milliseconds is used as standard. Therefore, pick-and-place cycle time decreases as the number of heads increases.
How Many Heads Are Enough?
The number of heads reduces the pick time by picking more parts at one time and X-Y travel time, if possible, but increases the placement time. In the case of a machine with two heads, the sum of the pick and X-Y travel time (380 milliseconds) is 57.6 percent of total cycle. However, in the case of eight heads, this drops to just 25.3 percent, reducing the returns significantly when using a large number of heads.
Another problem is that as the number of heads increases, the opportunity to simultaneously pick parts generally decreases. From a simple statistical point of view, needing more parts to be in the right locations at the same time is less likely. Thus, it is reasonable to expect fewer simultaneous pick opportunities on a machine with more heads, diminishing the total pick time advantages.

The most efficient way to increase the pick-and-place time of a simple ganged-head machine is to reduce the placement time. Traditionally, this was accomplished by reducing the placement time to minimize the Z-axis (up and down) movement, increasing X-Y movement speed, or increasing Z-axis speed. Newer designs have added a twin-beam method in which a single machine has two X beams, each with a separate ganged-head assembly. One head can pick while the other is placing. However, having 16 heads on a twin-beam machine (eight heads on each beam) is inefficient as optimization can rarely, if ever, be realized.
Nearly 75 percent of cycle time (1,120 milliseconds) is placement. On a twin-beam system, while one beam is placing, the other is picking. Because the picking time is much shorter, the picking beam (or head) must wait for the placing beam. This is estimated to be as much as 740 milliseconds of wasted time.
The optimum configuration is a dual-head system with four ganged heads on each base for eight total nozzles (two heads x four nozzles). Both heads are mounted to a single X beam, but move independently in the X direction using separate motors and linear encoders. Like an eight-headed machine, it can pick eight components simultaneously, but unlike a dual-beam machine, it can place two parts simultaneously. Because of the head arrangement and positioning system, the machine will almost double the placement rate of a four-head/single-beam machine in real production. A twin-beam machine with two sets of eight ganged heads would only offer a 50 percent increase in actual throughput.
Conclusion
Because the pick time is relatively short in comparison to the placement time, the benefits of adding more heads diminish rapidly after the fourth one and usually adversely affect the throughput on the average SMT PCB. The best way to increase throughput on an X-Y gantry system is to decrease the longest component placement time. Using a system with two heads with four nozzles each, a machine can simultaneously pick eight parts and place two. It will have nearly twice the actual throughput of an identical machine with only four nozzles on a single head. A similar twin-beam machine would have only the theoretical placement rate of 1.5X.
GARY BURROUGHS, president, and GERRY PADNOS, director of technology, may be contacted at Juki Automation Systems, 507 Airport Blvd., Morrisville, NC 27560; (919) 460-0111; Fax: (919) 469-0480.
Share on:



