











 Dan’s Biz Bookshelf: ‘Abundance: How We Build a Better Future’
Dan’s Biz Bookshelf: ‘Abundance: How We Build a Better Future’ Trouble in Your Tank: In Complex Systems, Design Rules Aren’t Optional
Trouble in Your Tank: In Complex Systems, Design Rules Aren’t Optional It’s Only Common Sense: The Phone Is Still Your Competitive Advantage
It’s Only Common Sense: The Phone Is Still Your Competitive Advantage





Helping Robots Handle Uncertainty
June 4, 2015 | MITEstimated reading time: 4 minutes
Decentralized partially observable Markov decision processes are a way to model autonomous robots’ behavior in circumstances where neither their communication with each other nor their judgments about the outside world are perfect.
The problem with Dec-POMDPs (as they’re abbreviated) is that they’re as complicated as their name. They provide the most rigorous mathematical models of multiagent systems — not just robots, but any autonomous networked devices —under uncertainty. But for all but the simplest cases, they’ve been prohibitively time-consuming to solve.
Last summer, MIT researchers presented a paper that made Dec-POMDPs much more practical for real-world robotic systems. They showed that Dec-POMDPs could determine the optimal way to stitch together existing, lower-level robotic control systems to accomplish collective tasks. By sparing Dec-POMDPs the nitty-gritty details, the approach made them computationally tractable.
At this year’s International Conference on Robotics and Automation, another team of MIT researchers takes this approach a step further. Their new system can actually generate the lower-level control systems from scratch, while still solving Dec-POMDP models in a reasonable amount of time.
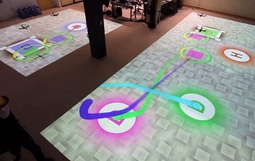
The researchers have also tested their system on a small group of robotic helicopters, in a scenario mimicking the type of drone package delivery envisioned by Amazon and Google, but with the added constraint that the robots can’t communicate with each other.
“There’s an offline planning phase where the agents can figure out a policy together that says, ‘If I take this set of actions, given that I’ve made these observations during online execution, and you take these other sets of actions, given that you’ve made these observations, then we can all agree that the whole set of actions that we take is pretty close to optimal,’” says Shayegan Omidshafiei, an MIT graduate student in aeronautics and astronautics and first author on the new paper. “There’s no point during the online phase where the agents stop and say, ‘This is my belief. This is your belief. Let’s come up with a consensus on the best overall belief and replan.’ Each one just does its own thing.”
What makes Dec-POMDPs so complicated is that they explicitly factor in uncertainty. An autonomous robot out in the world may depend on its sensor readings to determine its location. But its sensors will probably be slightly error-prone, so any given reading should be interpreted as defining a probability distribution surrounding the actual measurement.
Even an accurate measurement, however, may be open to interpretation, so the robot would need to build a probability distribution of possible locations on top of the probability distribution of sensor readings. Then it has to choose a course of action, but its possible actions will have their own probabilities of success. And if the robot is participating in a collaborative task, it also has to factor in the probable locations of other robots and their consequent probabilities of taking particular actions.
Since a probability distribution consists of a range of possible values — in principle, an infinite number of values — solving a problem with probabilities heaped on probabilities is much harder than solving a problem involving discrete values.
To make it easier to solve a Dec-POMDP, Omidshafiei and his co-authors — his thesis advisor, Maclaurin Professor of Aeronautics and Astronautics Jonathan How; Ali-akbar Agha-mohammadi, a former postdoc in MIT’s Laboratory for Information and Decision Systems who is now at Qualcomm Research; and Christopher Amato, who led the earlier work on Dec-POMDPs as a postdoc in MIT’s Computer Science and Artificial Intelligence Laboratory and has just joined the faculty of the University of New Hampshire — decompose it into two problems, both of which involve graphs.
A graph is data representation consisting of nodes, usually depicted as circles, and edges, usually depicted as lines connecting the circles. Network diagrams and family trees are familiar examples.
The researchers’ algorithm first constructs a graph in which each node represents a “belief state,” meaning a probabilistic estimate of an agent’s own state and the state of the world. The algorithm then creates a set of control procedures — the edges of the graph — that can move the agent between belief states.
The researchers refer to these control procedures as “macro-actions.” Because a single macro-action can accommodate a range of belief states at both its origin and its destination, the planning algorithm has removed some of the problem’s complexity before passing it on to the next stage.
For each agent, the algorithm then constructs a second graph, in which the nodes represent macro-actions defined in the previous step, and the edges represent transitions between macro-actions, in light of observations. In the experiments reported in the new paper, the researchers then ran a host of simulations of the task the agents were intended to perform, with agents assuming different, random states at the beginning of each run. On the basis of how well the agents executed their tasks each time through, the planning algorithm assigned different weights to the macro-actions at the nodes of the graph and to the transitions between nodes.
The result was a graph capturing the probability that an agent should perform a particular macro-action given both its past actions and its observations of the world around it. Although those probabilities were based on simulations, in principle, autonomous agents could build the same type of graph through physical exploration of their environments.
Finally, the algorithm selects the macro-actions and transitions with the highest weights. That yields a deterministic plan that the individual agents can follow: After performing macro-action A, if you make measurement B, execute macro-action C.
Share on:




Subscribe
Stay ahead of the technologies shaping the future of electronics with our latest newsletter, Advanced Electronics Packaging Digest. Get expert insights on advanced packaging, materials, and system-level innovation, delivered straight to your inbox.
Subscribe now to stay informed, competitive, and connected.
Suggested Items
TLT Electronics Officially Opens Facility in Vietnam
05/06/2026 | TLT ElectronicsLithuanian EMS provider TLT Electronics has recently announced the opening of a new facility in Vietnam. For their clients, this is a chance to expand manufacturing into a second region without the headache of onboarding a new supplier. Same team, same processes, same quality standards — still TLT Manufacturing, just on another continent.
Elementary, Mr. Watson DFX—Basically a Basket of Crabs With Spreadsheets
04/22/2026 | John Watson -- Column: Elementary, Mr. WatsonOne of the joys of living in San Diego is that I'm never far from the ocean. Aside from burying my toes in the sand at the beach, I particularly enjoy going down where the fishing boats come in. I once watched a fisherman standing beside several baskets of crabs. Most had lids tied on, but one was completely open. Curious, I asked why he wasn't worried about them escaping. It reminded me of a well-known story.
Voyager Launches Center to Advance U.S. Space and National Security Capabilities
03/13/2026 | BUSINESS WIREVoyager Technologies announced a new facility in Long Beach, California – widely known as “Space Beach” – to expand the company’s ability to capture the significant demand signal across civil, national security and commercial space missions.
I-Connect007 to Launch Weekly Show & Tell Newsletter Series Featuring APEX EXPO Highlights
03/12/2026 | I-Connect007Building on our tradition of delivering comprehensive coverage of APEX EXPO 2026, I-Connect007 will present a five-episode Show & Tell Newsletter series, arriving in subscribers’ inboxes each Friday, March 27 to April 24. The special series will highlight key moments from the Global Electronics Association’s annual trade show, offering readers an inside look at the people, companies, and ideas shaping the electronics manufacturing industry.
The Marketing Minute: Your Marketing Funnel Has a Memory Problem
03/11/2026 | Brittany Martin -- Column: The Marketing MinuteMany marketing teams work incredibly hard to generate attention. They launch campaigns. Announcements go out. New content is published, and digital promotions are pushed across multiple channels. For a short period, engagement spikes, website traffic rises, and the leads come rolling in. For sales, it all feels so promising. But then traffic returns to normal levels, engagement softens, and the sales team finds itself restarting conversations that never fully developed. When this happens, companies often assume they have a lead problem.